40 deep learning lane marker segmentation from automatically generated labels
US Patent Application for DEEP LEARNING CONTINUOUS LANE LINES DETECTION ... DEEP LEARNING CONTINUOUS LANE LINES DETECTION SYSTEM FOR AUTONOMOUS VEHICLES . Oct 11, 2018. According to an embodiment, a system receives a captured image perceiving one or more lane markers surrounding the ADV from an image capturing device of the ADV. The system detects one or more continuous lane lines based on the one or more lane markers ... Deep reinforcement learning based lane detection and localization To address the problems mentioned above, we propose a deep reinforcement learning based network for lane detection and localization. It consists of a deep convolutional lane bounding box detector and a Deep Q-Learning localizer. The structural diagram of the proposed network is shown in Fig. 2. It is a two-stage sequential processing architecture.
Watershed OpenCV - PyImageSearch The watershed algorithm is a classic algorithm used for segmentation and is especially useful when extracting touching or overlapping objects in images, such as the coins in the figure above.. Using traditional image processing methods such as thresholding and contour detection, we would be unable to extract each individual coin from the image — but by leveraging the watershed algorithm, we ...
Deep learning lane marker segmentation from automatically generated labels
CNN based lane detection with instance segmentation in edge-cloud ... Using deep learning to detect lane lines can ensure good recognition accuracy in most scenarios . Insteading of relying on highly specialized manual features and heuristics to identify lane breaks in traditional lane detection methods, target features under deep learning can automatically learn and modify parameters during the training process. Lane Detection with Deep Learning (Part 1) | by Michael Virgo | Towards ... This is part one of my deep learning solution for lane detection, which covers the limitations of my previous approaches as well as the preliminary data used. Part two can be found here! It discusses the various models I created and my final approach. The code and data mentioned here and in the following post can be found in my Github repo. Recognition, Object Detection, and Semantic Segmentation Semantic Segmentation. Semantic image segmentation. Object Detection. Perform classification, object detection, transfer learning using convolutional neural networks (CNNs, or ConvNets), create customized detectors. Text Detection and Recognition. Detect and recognize text using image feature detection and description, deep learning, and OCR.
Deep learning lane marker segmentation from automatically generated labels. An Integrated Stereo-Based Approach to Automatic Vehicle Guidance Deep learning lane marker segmentation from automatically generated labels Conference Paper Sep 2017 Karsten Behrendt Jonas Witt View A method for constructing an actual virtual map of the road... Automatically Segment and Label Objects in Video (Project 203) #33 - GitHub The main goal of the project is to develop a label automation algorithm that can generate pixel level labels for a single object (dynamic or static) across multiple video frames. The automation algorithm should make it easier for a user to generate pixel level labels without a human user having to label each individual video frame. Automatic lane marking prediction using convolutional neural network ... Lane detection is a technique that uses geometric features as an input to the autonomous vehicle to automatically distinguish lane markings. To process the intricate features present in the lane images, traditional computer vision (CV) techniques are typically time-consuming, need more computing resources, and use complex algorithms. Epithelium segmentation using deep learning in H&E-stained prostate ...
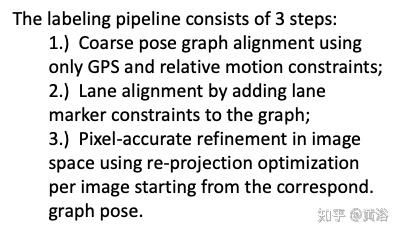
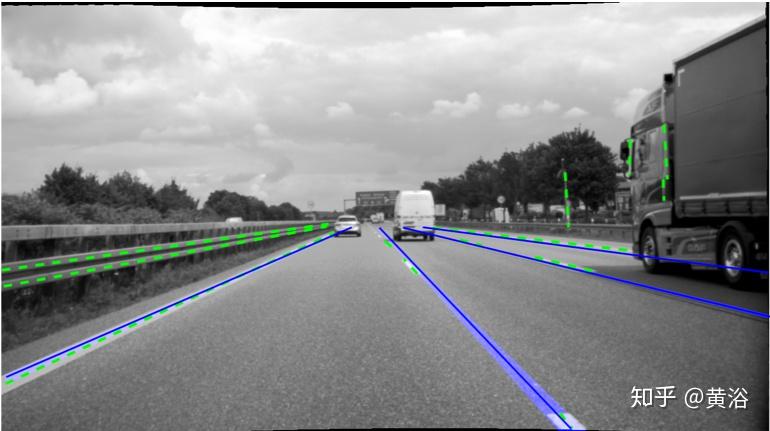
PDF Unsupervised Labeled Lane Markers Using Maps In this section, we describe our automated labeling pipeline used to generate labeled lane marker images from our maps. We use the following notation for frames and transforms throughout this paper:B A T denotes the rigid body transform from frame A to B 2SE(3) [24], where frame A describes the space 2R3whose origin is at the position of A. camera-based Lane detection by deep learning - SlideShare deep learning lane marker segmentation from automatically generated labels train a dnn for detecting lane markers in images without manually labeling any images. to project hd maps for ad into the image and correct for misalignments due to inaccuracies in localization and coordinate frame transformations. the corrections are performed by … Benchmarking of deep learning algorithms for 3D instance segmentation ... The DL network is first trained to produce a semantic segmentation which corresponds as closely as possible to a given ground truth. The trained network is then used to segment unseen images. The resulting semantic segmentation is then further processed to obtain the final instance segmentation. DL, deep learning. Direction-aware feedback network for robust lane detection The proposed network consists of three encoder-decoder streams to generate the lane segmentation map and one auxiliary branch to predict the existence of lane pixels as shown in Fig. ], ENet [ Table 1 The detailed architecture of the proposed method Full size table Directional attention module 3.
Deep Learning Lane Marker Segmentation From Automatically Generated Labels Deep Learning Lane Marker Segmentation From Automatically Generated Labels 字幕版之后会放出,敬请持续关注 欢迎加入人工智能 ... A Deep Learning Pipeline for Nucleus Segmentation - Zaki - 2020 ... The semantic segmentation labels of nuclei from fluorescence microscopy images used both in training and testing of the segmentation models were generated semi-automatically in two steps. First, preliminary labels were automatically generated using either classical image processing techniques, for example, seeded watershed ( 19 ) or existing ... Tom-Hardy-3D-Vision-Workshop/awesome-Autopilot-algorithm End-to-End Ego Lane Estimation based on Sequential Transfer Learning for Self-Driving Cars; Deep Learning Lane Marker Segmentation From Automatically Generated Labels; VPGNet: Vanishing Point Guided Network for Lane and Road Marking Detection and Recognition; Spatial as Deep: Spatial CNN for Traffic Scene Understanding; Towards End-to-End Lane ... Github: Awesome Lane Detection - Medium Detecting Lane and Road Markings at A Distance with Perspective Transformer Layers. FusionLane: Multi-Sensor Fusion for Lane Marking Semantic Segmentation Using Deep Neural Networks GitHub. PINet:Key Points Estimation and Point Instance Segmentation Approach for Lane Detection GitHub.
基于摄像头的车道线检测方法一览_qq_43222384的博客-CSDN博客
A review of lane detection methods based on deep learning By labeling regression bounding boxes or feature points for each lane segment, lanes can be detected by coordinate regression; 3) segmentation-based method. Lanes and background pixels are labeled as different classes. And the detection results can be obtained in the form of pixel-level classification (semantic segmentation/instance segmentation).
基于摄像头的车道线检测方法一览 - 知乎
US20180283892A1 - Automated image labeling for vehicles based ... - Google Deep learning provides a highly accurate technique for training a vehicle system to detect lane markers. However, deep learning also requires vast amounts of labeled data to properly train the vehicle system. As described below, a neural network is trained for detecting lane markers in camera images without manually labeling any images.

Deep Learning Lane Marker Segmentation From Automatically Generated Labels Karsten 50 subscribers Supplementary material to our IROS 2017 paper "Deep Learning Lane Marker Segmentation From Automatically Generated Labels". ... The first...
基于摄像头的车道线检测方法一览 - 知乎
PDF Unsupervised Labeled Lane Markers Using Maps In this section, we describe our automated labeling pipeline used to generate labeled lane marker images from our maps. We use the following notation for frames and transforms throughout this paper:B A T denotes the rigid body transform from frame A to B 竏・SE(3) [23], where frame A describes the space 竏・R3whose origin is at the position of A.

Deep learning lane marker segmentation from automatically generated labels This work proposes to automatically annotate lane markers in images and assign attributes to each marker such as 3D positions by using map data, and publishes the Unsupervised LLAMAS dataset of 100,042 labeled lane marker images which is one of the largest high-quality lane marker datasets that is freely available. 17 PDF
Post a Comment for "40 deep learning lane marker segmentation from automatically generated labels"